map
map是怎么实现的
Go 语言采用的是哈希查找表,并且使用链表解决哈希冲突。
// A header for a Go map.
type hmap struct {
// 元素个数,调用 len(map) 时,直接返回此值
count int
flags uint8
// buckets 的对数 log_2
B uint8
// overflow 的 bucket 近似数
noverflow uint16
// 计算 key 的哈希的时候会传入哈希函数
hash0 uint32
// 指向 buckets 数组,大小为 2^B
// 如果元素个数为0,就为 nil
buckets unsafe.Pointer
// 扩容的时候,buckets 长度会是 oldbuckets 的两倍
oldbuckets unsafe.Pointer
// 指示扩容进度,小于此地址的 buckets 迁移完成
nevacuate uintptr
extra *mapextra // optional fields
}map分为hmap和bmap,hmap是一个哈希表,bmap是一个数组,golang用链表法解决哈希冲突,如果溢出会弄一个溢出bucket放进去。
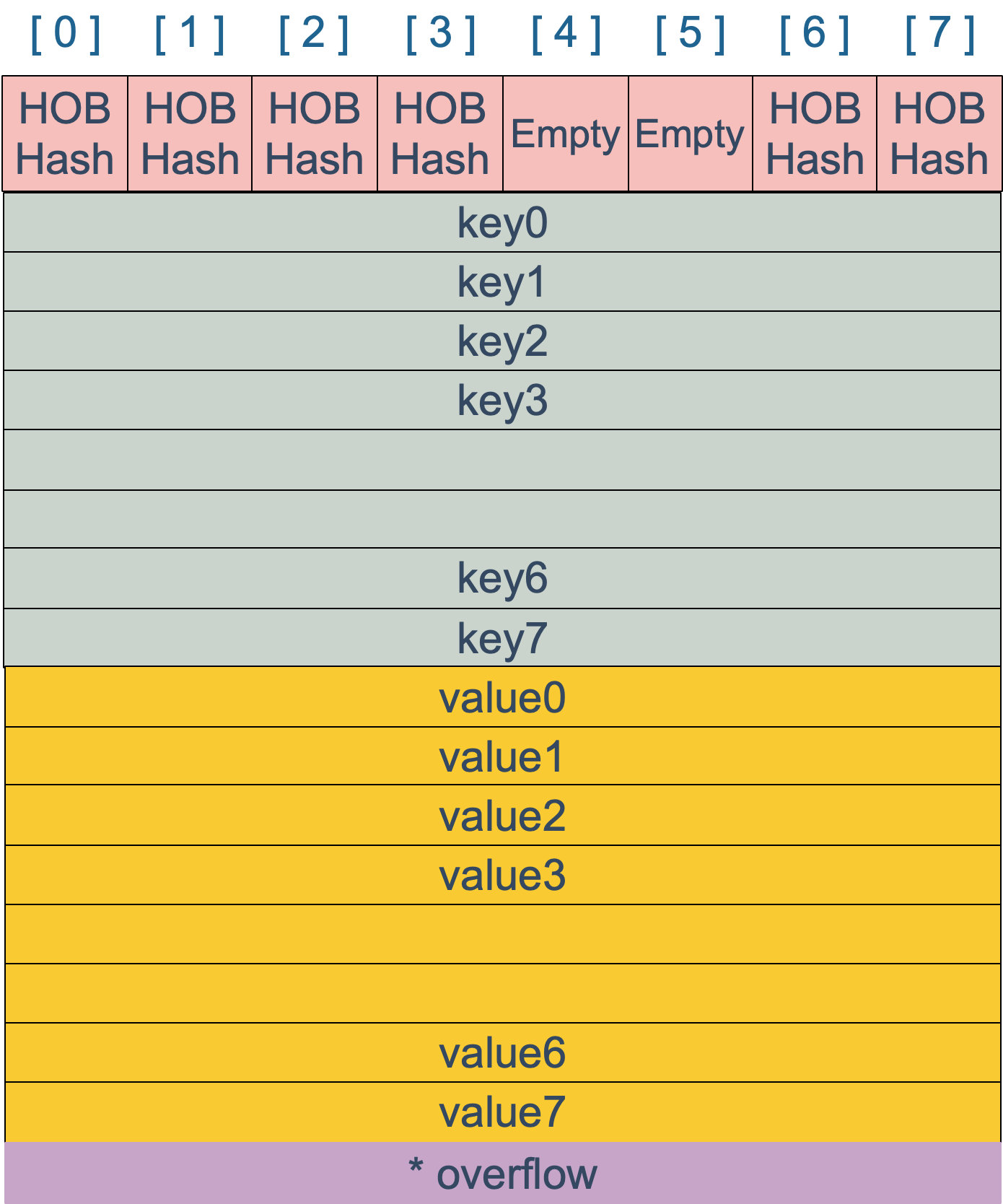
bmap 是存放 k-v 的地方,我们把视角拉近,仔细看 bmap 的内部组成。
type bmap struct {
topbits [8]uint8
keys [8]keytype
values [8]valuetype
pad uintptr
overflow uintptr
}
创建map
从语法层面上来说,创建 map 很简单:
ageMp := make(map[string]int)
// 指定 map 长度
ageMp := make(map[string]int, 8)
// ageMp 为 nil,不能向其添加元素,会直接panic
var ageMp map[string]int通过汇编语言可以看到,实际上底层调用的是 makemap 函数,主要做的工作就是初始化 hmap 结构体的各种字段,例如计算 B 的大小,设置哈希种子 hash0 等等。
func makemap(t *maptype, hint int64, h *hmap, bucket unsafe.Pointer) *hmap {
// 省略各种条件检查...
// 找到一个 B,使得 map 的装载因子在正常范围内
B := uint8(0)
for ; overLoadFactor(hint, B); B++ {
}
// 初始化 hash table
// 如果 B 等于 0,那么 buckets 就会在赋值的时候再分配
// 如果长度比较大,分配内存会花费长一点
buckets := bucket
var extra *mapextra
if B != 0 {
var nextOverflow *bmap
buckets, nextOverflow = makeBucketArray(t, B)
if nextOverflow != nil {
extra = new(mapextra)
extra.nextOverflow = nextOverflow
}
}
// 初始化 hamp
if h == nil {
h = (*hmap)(newobject(t.hmap))
}
h.count = 0
h.B = B
h.extra = extra
h.flags = 0
h.hash0 = fastrand()
h.buckets = buckets
h.oldbuckets = nil
h.nevacuate = 0
h.noverflow = 0
return h
}key 定位过程

key 经过哈希计算后得到哈希值,共 64 个 bit 位(64位机,32位机就不讨论了,现在主流都是64位机),计算它到底要落在哪个桶时,只会用到最后 B 个 bit 位。还记得前面提到过的 B 吗?如果 B = 5,那么桶的数量,也就是 buckets 数组的长度是 2^5 = 32。
例如,现在有一个 key 经过哈希函数计算后,得到的哈希结果是:
10010111 | 000011110110110010001111001010100010010110010101010 │ 01010
用最后的 5 个 bit 位,也就是 01010,值为 10,也就是 10 号桶。这个操作实际上就是取余操作,但是取余开销太大,所以代码实现上用的位操作代替。
再用哈希值的高 8 位,找到此 key 在 bucket 中的位置,这是在寻找已有的 key。最开始桶内还没有 key,新加入的 key 会找到第一个空位,放入。
buckets 编号就是桶编号,当两个不同的 key 落在同一个桶中,也就是发生了哈希冲突。冲突的解决手段是用链表法:在 bucket 中,从前往后找到第一个空位。这样,在查找某个 key 时,先找到对应的桶,再去遍历 bucket 中的 key。
map扩容过程是怎么样的
需要一个指标来判断是否要扩容,这就是装载因子。Go 源码里这样定义 装载因子:
loadFactor := count / (2^B)count 就是 map 的元素个数,2^B 表示 bucket 数量。
再来说触发 map 扩容的时机:在向 map 插入新 key 的时候,会进行条件检测,符合下面这 2 个条件,就会触发扩容:
- 装载因子超过阈值,源码里定义的阈值是 6.5。
- overflow 的 bucket 数量过多:当 B 小于 15,也就是 bucket 总数 2^B 小于 2^15 时,如果 overflow 的 bucket 数量超过 2^B;当 B >= 15,也就是 bucket 总数 2^B 大于等于 2^15,如果 overflow 的 bucket 数量超过 2^15。
// src/runtime/hashmap.go/mapassign
// 触发扩容时机
if !h.growing() && (overLoadFactor(int64(h.count), h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) {
hashGrow(t, h)
}
// 装载因子超过 6.5
func overLoadFactor(count int64, B uint8) bool {
return count >= bucketCnt && float32(count) >= loadFactor*float32((uint64(1)<<B))
}
// overflow buckets 太多
func tooManyOverflowBuckets(noverflow uint16, B uint8) bool {
if B < 16 {
return noverflow >= uint16(1)<<B
}
return noverflow >= 1<<15
}再来看看真正执行搬迁工作的 growWork() 函数。
func growWork(t *maptype, h *hmap, bucket uintptr) {
// 确认搬迁老的 bucket 对应正在使用的 bucket
evacuate(t, h, bucket&h.oldbucketmask())
// 再搬迁一个 bucket,以加快搬迁进程
if h.growing() {
evacuate(t, h, h.nevacuate)
}
}h.growing() 函数非常简单:
func (h *hmap) growing() bool {
return h.oldbuckets != nil
}如果 oldbuckets 不为空,说明还没有搬迁完毕,还得继续搬。
TODO:evacuate函数干了什么下次看懂源码再写,一个搬迁的细节是搬到大内存去的时候得重新hash计算放到哪个bucket中,因为比原来多了一位。
问题
1、为什么map不可以寻址,map是怎么存储的
- 如果字典的元素不存在,则返回零值,而零值是不可变对象,如果能寻址问题就大了。
- 而如果字典的元素存在,考虑到 Go 中 map 实现中元素的地址是变化的,这意味着寻址的结果也是无意义的。
并发map(sync.map)
type Map struct {
mu Mutex
// 基本上你可以把它看成一个安全的只读的map
// 它包含的元素其实也是通过原子操作更新的,但是已删除的entry就需要加锁操作了
read atomic.Value // readOnly
// 包含需要加锁才能访问的元素
// 包括所有在read字段中但未被expunged(删除)的元素以及新加的元素
dirty map[interface{}]*entry
// 记录从read中读取miss的次数,一旦miss数和dirty长度一样了,就会把dirty提升为read,并把dirty置空
misses int
}
type readOnly struct {
m map[interface{}]*entry
amended bool // 当dirty中包含read没有的数据时为true,比如新增一条数据
}
// expunged是用来标识此项已经删掉的指针
// 当map中的一个项目被删除了,只是把它的值标记为expunged,以后才有机会真正删除此项
var expunged = unsafe.Pointer(new(interface{}))
// entry代表一个值
type entry struct {
p unsafe.Pointer // *interface{}
}Store方法
Store 方法用来设置一个键值对,或者更新一个键值对。
func (m *Map) Store(key, value interface{}) {
read, _ := m.read.Load().(readOnly)
// 如果read字段包含这个项,说明是更新,cas更新项目的值即可
if e, ok := read.m[key]; ok && e.tryStore(&value) {
return
}
// read中不存在,或者cas更新失败,就需要加锁访问dirty了
m.mu.Lock()
read, _ = m.read.Load().(readOnly)
if e, ok := read.m[key]; ok { // 双检查,看看read是否已经存在了
if e.unexpungeLocked() {
// 此项目先前已经被删除了,需要添加到 dirty 中
m.dirty[key] = e
}
e.storeLocked(&value) // 更新
} else if e, ok := m.dirty[key]; ok { // 如果dirty中有此项
e.storeLocked(&value) // 直接更新
} else { // 否则就是一个新的key
if !read.amended { //如果dirty为nil
// 需要创建dirty对象,并且标记read的amended为true,
// 说明有元素它不包含而dirty包含
m.dirtyLocked()
m.read.Store(readOnly{m: read.m, amended: true})
}
m.dirty[key] = newEntry(value) //将新值增加到dirty对象中
}
m.mu.Unlock()
}
// tryStore利用 cas 操作来更新value。
// 更新之前会判断这个键值对有没有被打上删除的标记
func (e *entry) tryStore(i *interface{}) bool {
for {
p := atomic.LoadPointer(&e.p)
if p == expunged {
return false
}
if atomic.CompareAndSwapPointer(&e.p, p, unsafe.Pointer(i)) {
return true
}
}
}
// 将值设置成 nil,表示没有被删除
func (e *entry) unexpungeLocked() (wasExpunged bool) {
return atomic.CompareAndSwapPointer(&e.p, expunged, nil)
}
// 通过复制 read 生成 dirty
func (m *Map) dirtyLocked() {
if m.dirty != nil {
return
}
read, _ := m.read.Load().(readOnly)
m.dirty = make(map[interface{}]*entry, len(read.m))
for k, e := range read.m {
if !e.tryExpungeLocked() {
m.dirty[k] = e
}
}
}
// 标记删除
func (e *entry) tryExpungeLocked() (isExpunged bool) {
p := atomic.LoadPointer(&e.p)
for p == nil {
if atomic.CompareAndSwapPointer(&e.p, nil, expunged) {
return true
}
p = atomic.LoadPointer(&e.p)
}
return p == expunged
}第2-6行,通过 cas 进行键值对更新,更新成功直接返回。
第8-28行,通过互斥锁加锁来处理处理新增键值对和更新失败的场景(键值对被标记删除)。
第11行,再次检查 read 中是否已经存在要 Store 的 key(双检查是因为之前检查的时候没有加锁,中途可能有协程修改了 read)。
如果该键值对之前被标记删除,先将这个键值对写到 dirty 中,同时更新 read。
如果 dirty 中已经有这一项了,直接更新 read。
如果是一个新的 key。dirty 为空的情况下通过复制 read 创建 dirty,不为空的情况下直接更新 dirty。
Load 方法
Load 方法比较简单,先是从 read 中读数据,读不到,再通过互斥锁锁从 dirty 中读数据。
func (m *Map) Load(key interface{}) (value interface{}, ok bool) {
// 首先从read处理
read, _ := m.read.Load().(readOnly)
e, ok := read.m[key]
if !ok && read.amended { // 如果不存在并且dirty不为nil(有新的元素)
m.mu.Lock()
// 双检查,看看read中现在是否存在此key
read, _ = m.read.Load().(readOnly)
e, ok = read.m[key]
if !ok && read.amended {//依然不存在,并且dirty不为nil
e, ok = m.dirty[key]// 从dirty中读取
// 不管dirty中存不存在,miss数都加1
m.missLocked()
}
m.mu.Unlock()
}
if !ok {
return nil, false
}
return e.load() //返回读取的对象,e既可能是从read中获得的,也可能是从dirty中获得的
}
func (m *Map) missLocked() {
m.misses++ // misses计数加一
if m.misses < len(m.dirty) { // 如果没达到阈值(dirty字段的长度),返回
return
}
m.read.Store(readOnly{m: m.dirty}) //把dirty字段的内存提升为read字段
m.dirty = nil // 清空dirty
m.misses = 0 // misses数重置为0
}这里需要注意的是,如果出现多次从 read 中读不到数据,得到 dirty 中读取的情况,就直接把 dirty 升级成 read,以提高 read 效率。
delete
下面是 Go1.13 中 Delete 的实现方式,如果 key 在 read 中,就将值置成 nil;如果在 dirty 中,直接删除 key。
func (m *Map) Delete(key interface{}) {
read, _ := m.read.Load().(readOnly)
e, ok := read.m[key]
if !ok && read.amended {
m.mu.Lock()
read, _ = m.read.Load().(readOnly)
e, ok = read.m[key]
if !ok && read.amended { // 说明可能在
delete(m.dirty, key)
}
m.mu.Unlock()
}
if ok {
e.delete()
}
}
func (e *entry) delete() (hadValue bool) {
for {
p := atomic.LoadPointer(&e.p)
if p == nil || p == expunged {
return false
}
if atomic.CompareAndSwapPointer(&e.p, p, nil) {
return true
}
}
}补充说明一下,delete() 执行完之后,e.p 变成 nil,下次 Store 的时候,执行到 dirtyLocked() 这一步的时候,会被标记成 enpunged。因此在 read 中 nil 和 enpunged 都表示删除状态。
sync.map 总结
上面对源码粗略的梳理了一遍,最后在总结一下 sync.map 的实现思路:
- 读写分离。读(更新)相关的操作尽量通过不加锁的 read 实现,写(新增)相关的操作通过 dirty 加锁实现。
- 动态调整。新写入的 key 都只存在 dirty 中,如果 dirty 中的 key 被多次读取,dirty 就会上升成不需要加锁的 read。
- 延迟删除。Delete 只是把被删除的 key 标记成 nil,新增 key-value 的时候,标记成 enpunged;dirty 上升成 read 的时候,标记删除的 key 被批量移出 map。这样的好处是 dirty 变成 read 之前,这些 key 都会命中 read,而 read 不需要加锁,无论是读还是更新,性能都很高。
总结了 sync.map 的设计思路后,我们就能理解官方文档推荐的 sync.map 的两种应用场景了。
参考网站:https://qcrao91.gitbook.io/go/map/map-de-di-ceng-shi-xian-yuan-li-shi-shi-mo
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!